


Dr Richter conducts research in the broad areas of control, robotics and mechatronics,
with application areas which include:
- biomedical robots, prostheses, advanced exercise machines
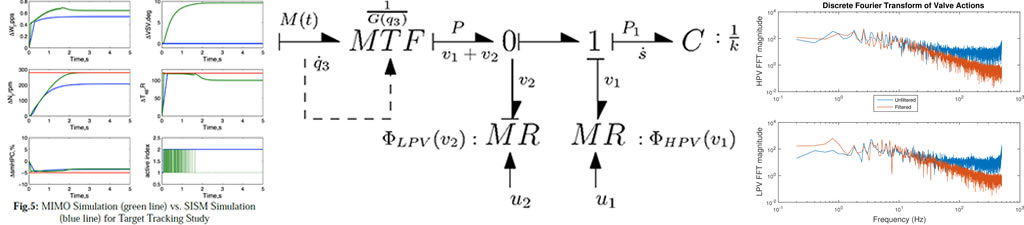
- aeroengine propulsion control
- high-precision motion control
- piezoelectric actuators and sensors
Research projects in these and other areas receive or have received funding from:
NASA Glenn Research Center, Dynamics and Control Branch (Cleveland)

National Science Foundation
Parker-Hannifin

Ohio Third Frontier
Cleveland Clinic Foundation
CSU Faculty Research and Development Program
Dr. Richter obtained the PhD and master’s degrees in Mechanical Engineering from Oklahoma State University . His undergraduate degree is also in Mechanical Engineering, from the Pontificia Universidad Católica del Perú in Lima.
Dr. Richter’s research interests include control theory and applications, system modeling, optimization, biomedical robotics, mechatronics and aerospace control systems.
Doctoral students:
- Dragos Dinca (NASA Glenn Research Center): Ultracapacitor storage for power beaming systems in UAVs
- Shola Otitoju
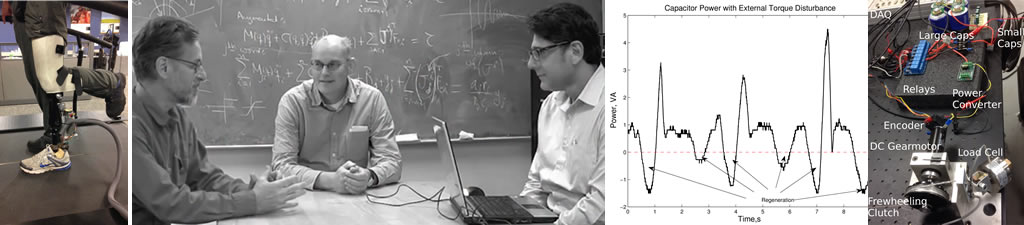
- Poya Khalaf: Energy regeneration in robotics, application to prosthetic legs
- Holly Warner: Nonlinear control of human-machine systems, application to prosthetic legs
- Amin Ghorbanpour: Energy regeneration in robotics
- Erivelton Gualter dos Santos: Energy regeneration in robotics, application to prosthetic legs
- Humberto de las Casas: Nonlinear control and optimization in human-robot systems, application to exercise and rehabilitation
Advanced Exercise and Rehabilitation Machines

This project aims at control, optimization and estimation of adaptive machines for athletic training, rehabilitation and exercise in microgravity. We seek to develop theoretical tools and methods to close feedback loops across human and machine at several levels, from local machine control to supervisory optimizers. The project is supported by the National Science Foundation.
Control of Electromechanical Systems with Energy Regeneration
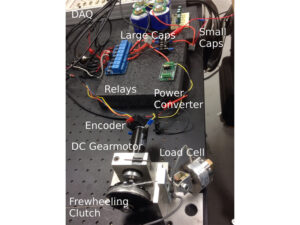
This project aims at physical modeling and optimal control of electromechanical systems with specific regard to energy efficiency through regeneration. We use novel devices such as ultracapacitors as energy storage devices in prosthetic devices, compact, self-powered exercise machines and robots. The project is supported by the National Science Foundation.
Prosthetics
This project aims at design, control and optimization of novel prosthetic devices, specifically below-knee prostheses. We focus on electromechanical designs capable of capturing and reusing the surplus energy associated with walking, while maintaining gait fidelity. The project is supported by the National Science Foundation.
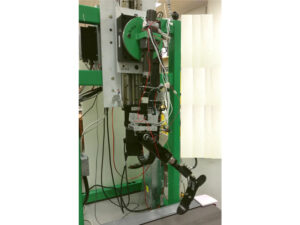
Control and Optimization of Robots with Energy Regeneration
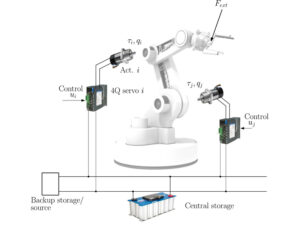
This project deals with robot motion control with explicit consideration of energy storage and reuse with regenerative drive systems. We use ultracapacitors as primary or supplementary energy storage devices for mobile and industrial robots. We look at both optimal design and optimal control problems for robots with bidirectional power transfer capabilities. The project is supported by the National Science Foundation.