|
|
- Hanz Richter. A Framework for Control of Robots With Energy Regeneration . ASME Journal of Dynamic Systems, Measurements and Control, DS-14-1090, 2015.
- Poya Khalaf. Design, Control, and Optimization of Robots with Advanced Energy Regenerative Drive Systems . PhD thesis, Cleveland State University, 2019.
- Hanz Richter, Xin Hui, Antonie van den Bogert and Dan Simon. Semiactive virtual control of a hydraulic prosthetic knee . IEEE Conference on Control Technology and Applications, Buenos Aires, 2016.
|
|
|
|
|
|
|
|
|
|
|
Download Code |
|
|
|
- Poya Khalaf. Design, Control, and Optimization of Robots with Advanced Energy Regenerative Drive Systems . PhD thesis, Cleveland State University, 2019.
- Poya Khalaf and Hanz Richter. Parametric optimization of stored energy in robots with regenerative drive systems . Proc. ASME/IEEE Intl. Symposium on Advanced Intelligent Mechatronics, Banff, Alberta, 2016.
- Poya Khalaf and Hanz Richter. On global, closed-form solutions to parametric optimization problems for robots with energy regeneration . ASME Journal of Dynamic Systems, Measurements and Control, DS-16-1436, 2018.
|
Download Code |
|
|
|
|
Download Code |
|
|
|
- Amin Ghorbanpour and Hanz Richter. Control With Optimal Energy Regeneration in Robot Manipulators Driven by Brushless DC Motors . Proc. ASME Dynamic Systems and Control Conference, Atlanta, GA 2018.
- Amin Ghorbanpour and Hanz Richter, A Novel Concept for Energy-Optimal, Independent-Phase Control of Brushless Motor Drivers, ASME Letters on Dynamic Systems and Control , 2 (2) 021004, Paper No: ALDSC-21-1020, 2021
- Amin Ghorbanpour and Hanz Richter. Energy-Optimal, Direct-Phase Control of Brushless Motors for Robotic Drives . Proc. ASME Dynamic Systems and Control Conference, (virtual) 2020.
|
Download Code for DSCC18 paper |
|
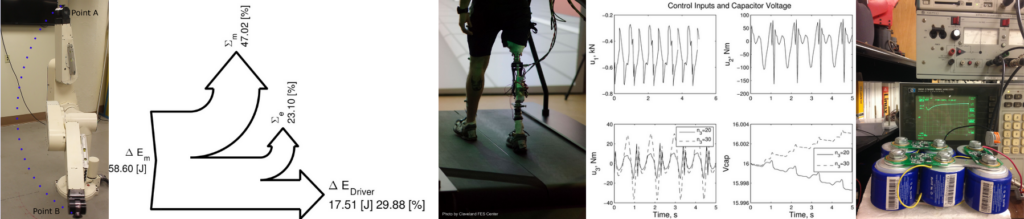
- Optimal Control and Design for Gait Fidelity and Energy Regeneration in Powered Prostheses (synopsis upcoming)
|
- Holly Warner, Poya Khalaf, Hanz Richter, Dan Simon, Elizabeth Hardin and Antonie van den Bogert, Early evaluation of a powered transfemoral prosthesis with force-modulated impedance control and energy regeneration . Medical Engineering & Physics , 100, 103744, 2021.
- Holly Warner. Optimal Design and Control of a Lower-Limb Prosthesis with Energy Regeneration . MSc thesis, Cleveland State University, 2015.
- Holly Warner, Dan Simon and Hanz Richter. Design optimization and control of a crank-slider actuator for a lower-limb prosthesis with energy regeneration . Proc. ASME/IEEE Intl. Symposium on Advanced Intelligent Mechatronics, Banff, Alberta, 2016.
- Gholamreza Khademi, Hanieh Mohammadi, Hanz Richter and Dan Simon Optimal Mixed Tracking/Impedance Control With Application to Transfemoral Prostheses With Energy Regeneration . IEEE Transactions on Biomedical Engineering , 65 (4) 2018.
- Poya Khalaf, Holly Warner, Elizabeth Hardin, Hanz Richter and Dan Simon. Development and experimental validation of an energy regenerative prosthetic knee controller and prototype . Proc. ASME Dynamic Systems and Control Conference, Tyson Corners, VA, 2016.
|
CrankSliderActuator |
|
- Energy-aware cooperative manipulation (synopsis upcoming)
|
|
|
|