
Hunter autonomous ground vehicle
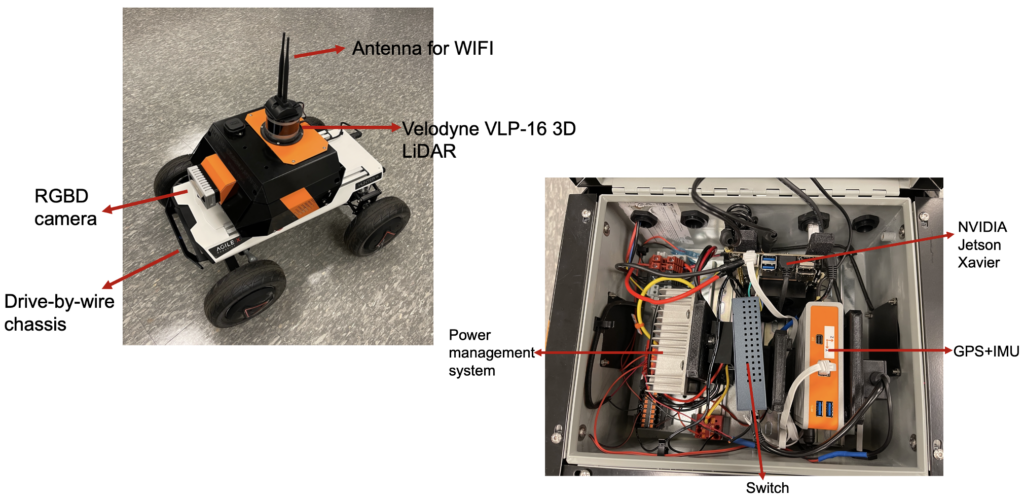
The UGV platform has a drive-by-wire chassis. The maximum payload is around 50 KG. The battery life is up to 3 hours. Its climbing capacity is around 30 degrees. The robot is used for indoor navigation and outdoor off-road field testings.
Baxter manufacturing robot
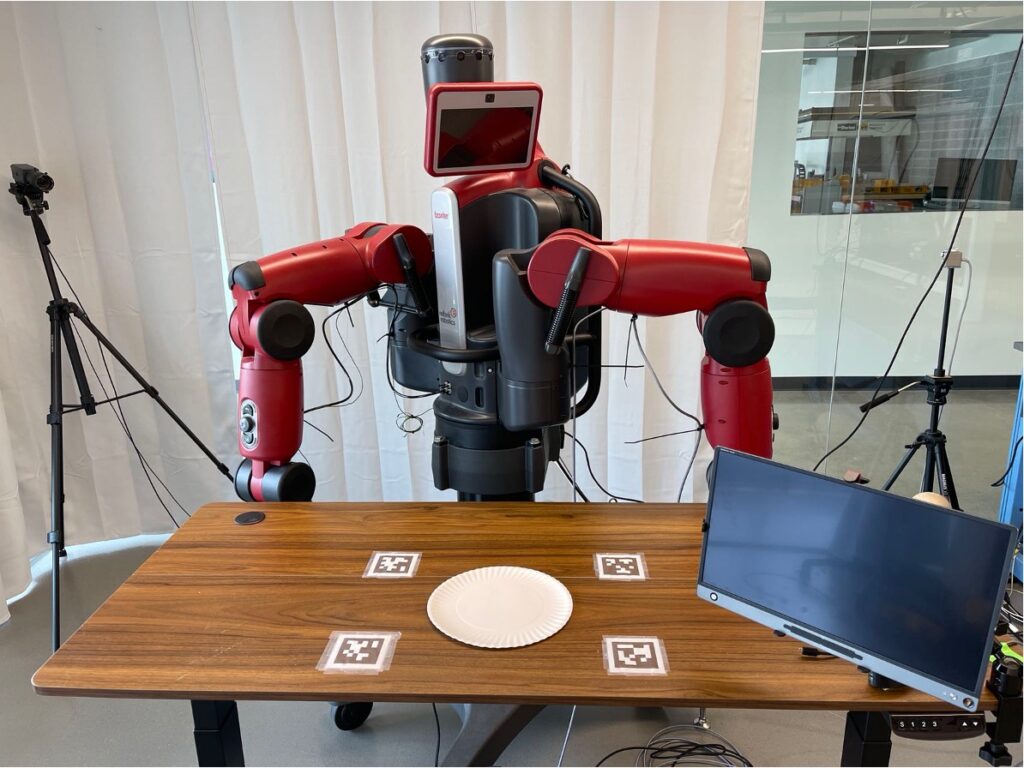
Baxter is a two-armed collaborative robot. The platform will be used to validate our control algorithms in a high-dimensional dynamic system and a human-robot safe interaction application.
torsional testbed

ECP Model 205 torsional testbed is a mechanical system that consists of a flexible vertical shaft connecting two disks – a lower disk and an upper disk. Each disk is equipped with an encoder for position measurement. A DC servo motor drives the lower disk through a belt and pulley system, which provides a 3:1 speed reduction ratio. The system can be used to study the vibration of a
torsional Two-Mass-Spring system. To test the effect of changing the inertia of the load, brass weights can be added to the upper disk.
Two-Mass-Spring Benchmark testbed

The rectilinear plant Model 210 has two mass carriers held by linear ball slide bearings, with high-resolution optical encoders mounted at each mass for the purpose of position measurement. This system appears commonly in dynamics and controls textbooks and serves as a benchmark for motion control method evaluation.