
Control
Gait event detection
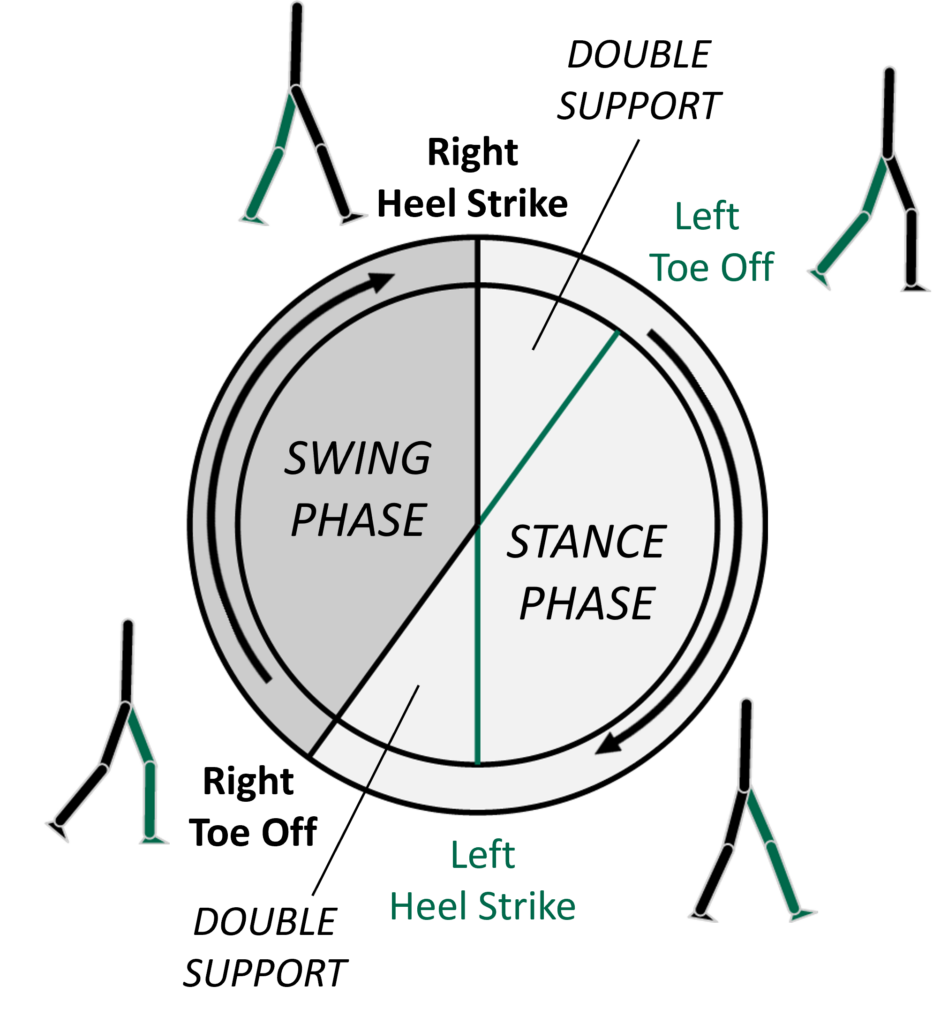
To effectively provide the appropriate support to the user, many control strategies for lower limb exoskeletons change the change the control objective between the stance and swing phases of gait. However, this requires the device to detect the transitions between these phases, known as gait events. Traditionally, gait events are detected by underfoot force-related sensors, but many lower limb exoskeleton designs opt to omit these sensors for various reasons. We are investigating the detection of gait events from the device configuration, measured by joint angle sensors and a thigh-worn inertial measurement unit. This innovation in exoskeleton control allows for advanced control strategies to be implemented on a variety of lower limb exoskeletons.
Hybrid zero dynamics control
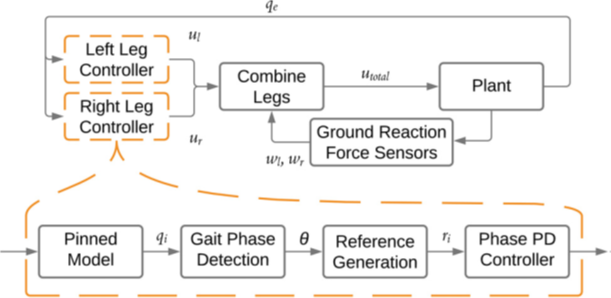
For individuals recovering from various pathologies affecting gait, robot assisted gait therapy can be a promising avenue towards regaining mobility and independence. Traditional control strategies for lower limb exoskeletons often track predetermined, time-dependent references. However, this approach enforces strict trajectory tracking, resulting in the exoskeleton driving the majority of the movement and encouraging patient passivity, rather than participation. We have investigated the application of hybrid zero dynamics control, which generates dynamically stable gait patterns based on the device configuration. As a result, user participation is encouraged throughout the gait cycle. Our work in this field marked the first application of hybrid zero dynamics control on an underactuated lower limb exoskeleton.
Impedance control strategies
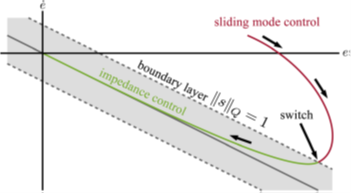
In rehabilitation scenarios where the patient has some amount of residual motor control, impedance control strategies have been investigated to minimize negative human-robot interactions. However, these strategies can apply large restoring forces when the system is outside of nominal conditions, potentially posing discomfort to the user. We have investigated augmenting traditional impedance control strategies with a sliding mode controller to gently guide the system back to nominal conditions, where control of the device is handed back over to the impedance controller. This development in lower limb exoskeleton control offers improved user safety during rehabilitation.