
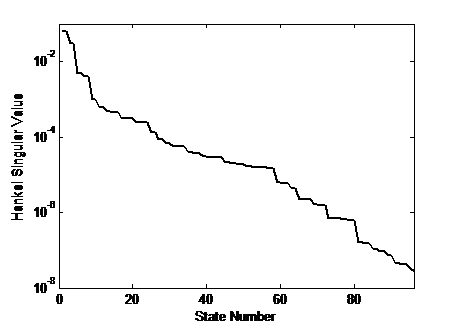
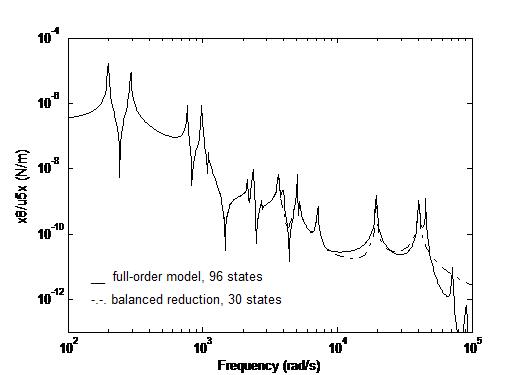
Model Order Reduction
RoMaDyC » Areas of Research » Dynamics and Control
The finite element based models of most realistic systems produce too many degrees of freedom – “too many” not only from the computational point of view (e.g., developing transient solutions), but also, what is even more important, from the parameter identification’s and system control’s points of view. The high order difficulty is basically common to all structural-dynamics problems but is particularly exacerbated in rotordynamics by presence of large concentrated damping forces and nonsymmetric stiffness and inertia matrices. In addition, the use of reduced-order models in monitoring and in feedback control schemes may lead to instability of control due to the excitation of unmodeled modes, an effect known as spillover.
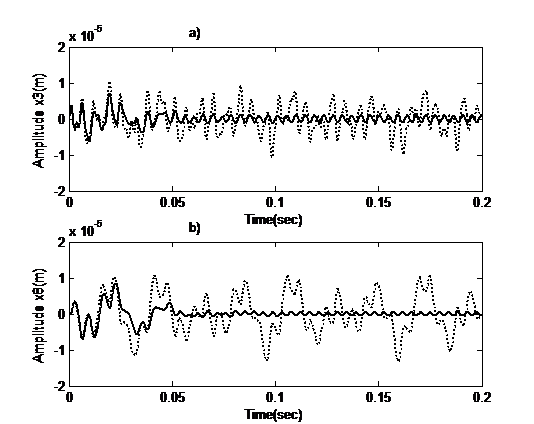
measured in x-direction at two different rotor stations.
- Sawicki J.T. and Gawronski, W., 1997, “Balanced Model Reduction and Control of Rotor-Bearing Systems,” ASME Journal of Engineering for Gas Turbines and Power, Vol. 119, pp. 456-463.