
Robust Control Oriented Model Validation
RoMaDyC » Areas of Research » Dynamics and Control
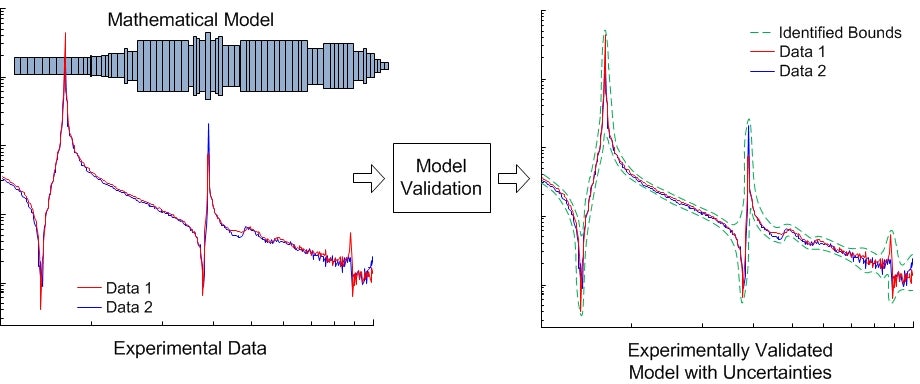
Robust control oriented model validation provides a quality measure of the model set by posing the question: does the bounded set include a perturbation and disturbance which account for each measured input-output datum? The developed technique guarantees a valid model set while minimizing the bound on the uncertainty, creating an accurate, robust model without introducing unnecessary conservativeness.
Current areas of application include next-generation robust control techniques, damage detection and identification, and model reconciliation. This research utilizes the robust control performance criterion, allowing for creation of a model set which accounts for the performance specification of the system, leading to improved robust performance and a less conservative model set. Damage detection and identification applications will utilize the uncertain model set to detect significant changes in a structure dynamics, which are indicative of damage with the added advantages of robustness to uncertainties in the system and sensor noise. Applying the technique in the model reconciliation scheme will account for uncertainties in the identification data sets as well as provide a quality measure for the extracted dynamics.
- Madden, R. and Sawicki, J.T., “Rotor Model Validation for an Active Magnetic Bearing Machining Spindle Using μ-Synthesis Approach,” Paper GT2012-69943, ASME Journal of Engineering for Gas Turbines and Power, vol. 134(9), 092501 (6 pages), 2012.
- Sawicki, J.T. and Madden, R., “Identification of Missing Dynamics in Rotor Systems using Robust Control Theory Approach,” Vibration Problems ICOVP 2011, Springer Proceedings in Physics, Vol. 330, pp. 581-587, 2011.
- Sawicki, J.T. and Maslen, E.H., “Accurate Identification of Plant Model for Robust Control of an AMB Machine Tool Spindle,” 9th International Conference on Motion and Vibration Control (MOVIC 2008), Munich, Germany, September 16-18, 2008.